NT-ARS V1 (ARS,IMU,각도측정)
| G.INS NT-ARSv1 |
- G.INS의 G는 관성항법장치에서 중요한 요소인 Gravity를 의미하기도 하며, 사용자에게 좀 더 나은 결과값을 제시하기 위해 Genius한 제품을 만들기 위한 저희의 의지를 의미하기도 합니다. 또한 G.INS의 INS는 관성항법장치(Inertial Navigation System)를 의미하는데, 관성항법장치는 엔코더와 같이 고정점이 있어야만 상대각도를 측정할 수 있는 센서를 사용할 수 없는 경우 자신의 자세를 측정하기 위한 필수 장비입니다. 이번에 저희 ㈜엔티렉스는 G.INS 제품군의 첫 제품으로 NT-ARSv1을 출시하게 되었습니다.
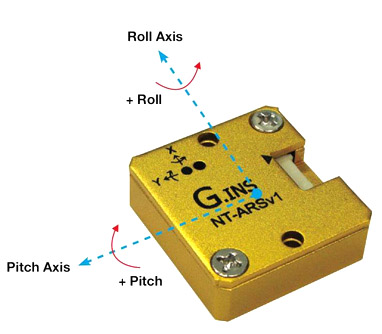
[그림 1]. Pitch, Roll의 개념도
- ARS(Attitude Reference System)는 관성항법장치들 중에서 [그림 1]에 보이듯이 진행방향과 측면방향을 중심으로 회전하는 각도(Roll, Pitch)를 의미합니다. 저희 NT-ARSv1은 32비트 ARM Cortex-M3 마이크로프로세서를 탑재하여 3축 가속도센서, 2축 자이로센서 의 데이터를 사용하여 6개의 3차원 자세정보(X, Y, Z, ROLL, PITCH, YAW) 중 ROLL 과 PITCH 의 각을 구하는 ARS 모듈로써, Roll과 Pitch의 각도와 각속도를 사용자에게 RS232나 CAN통신으로 라디안(radian) 단위로 출력해 주도록 설계되어 있습니다.
저희 NT-ARSv1은- 소형 항공기의 자세측정이나
- 로봇의 특정 지점의 절대각도,
- 세그웨이와 같은 밸런싱로봇의 자세측정
| General Specification |
- 알루미늄 케이스 초소형사이즈
- 작동 환경 : 각속도 500°/s, 가속도 1.5g, 온도 -10 ~ 80°C 이내
- 작동 범위 : ±90°이내
- 0° 유지 Error < 0.5°
- Dynamic Error < 2 ° (±80 ° 이내)
- Resolution : 0.001rad
- Response Time : 10ms
- Size(L,W,H) : 29.6mm , 31.4mm, 10mm
- 무게 : 20 g
- 구성품 : 본체 1개 + 케이블 1개
| Interfaces |
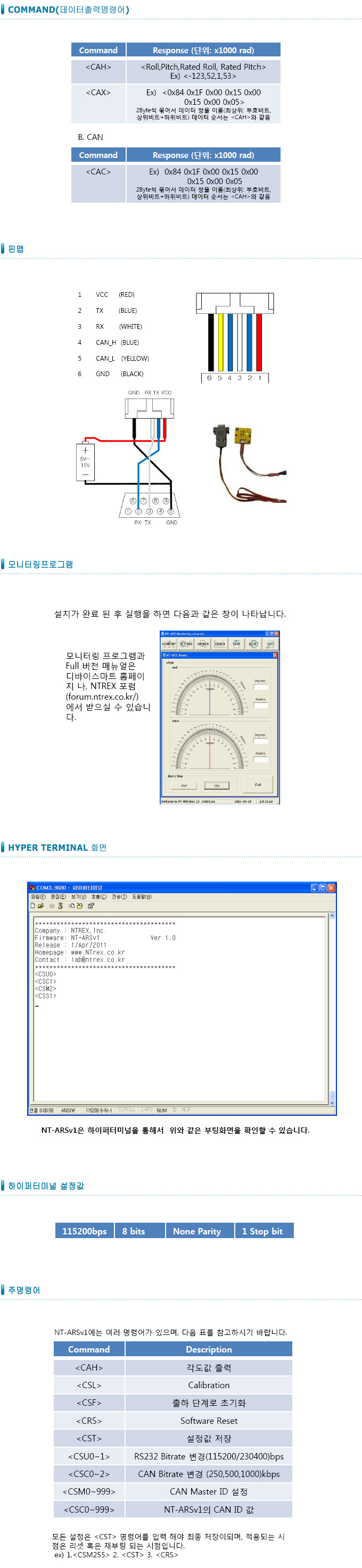
- RS232
- CAN
- Monitoring Program(RS232)
| Electric Specification |
- Input Voltage : 4.5 ~ 10V
- Memory Write Cycle : 100,000회
- Supply Current : 100mA
| AVR 예제프로그램 |
- AVR 예제프로그램다운받기 <클릭>
| 소프트웨어 프로그램 |
- NT-ARS(Ver1.0) windows 7, windows vista 용 소프트웨어 다운로드 <클릭>
- NT-ARS(Ver1.0) windows xp용 소프트웨어 다운로드 <클릭>
| 동영상 |
| 동영상- NT-ARSv1 윈도우프로그램 |
| 동영상-(응용예) 스케이트로봇 |
| 예제 자료 |
| |
